インフレータブルアクチュエータ
プラスティックフィルムで構成されたエアバッグ状のアクチュエータです。 薄膜で内圧を加えて機能を発揮します。極めて軽量かつ、非加圧にすると低剛性にもなります。

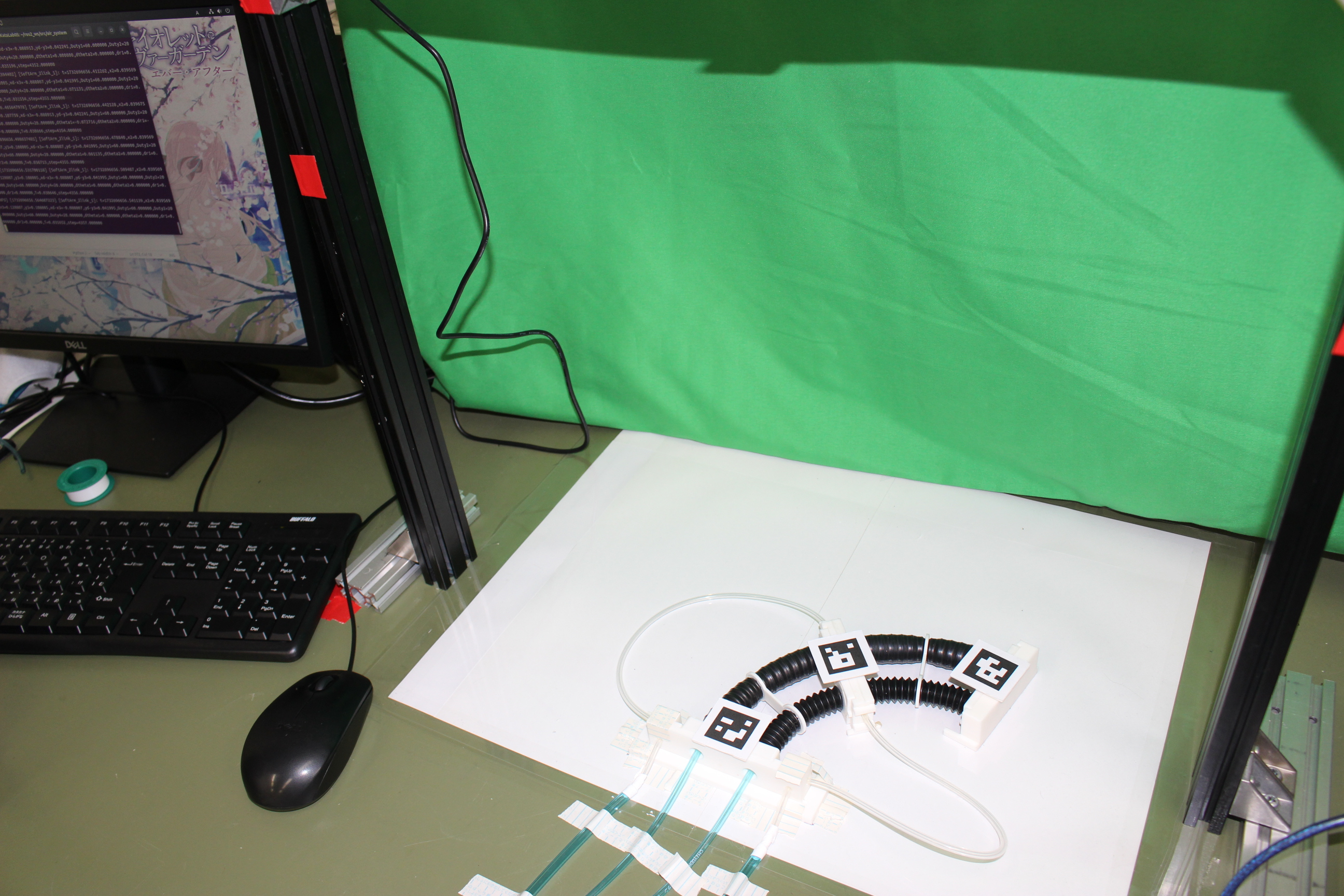
屈曲型アクチュエータの設計
プラスティックフィルムを利用した袋状の空気圧アクチュエータです.
折り込み構造を持つ屈曲型アクチュエータの、折り込み部(プリーツ部)を可変剛性の回転バネとして、
静的な力特性を実験的に導出し、設計手法の確立を行っています。

看護マッサージの学習支援用ソフトセンサの開発
看護におけるハンドマッサージは身体的・精神的に効果的な可能性が示唆されています。
一方で、修得には専任の教員の必要性や自己学習の困難さが指摘されています。
本研究ではシリコーンゴムを用いたソフトセンサを用いて、
分布的な力などを視覚教示する学習システムを開発しています。