空気で動く人に優しいソフトロボティクス
本研究プロジェクトでは,アクチュエータや機構の極軽量化・柔軟化による,人に触れても安全なロボット及びその新機械要素の研究を進めています.
インフレータブルアクチュエータ
プラスティックフィルムを利用した袋状の空気圧アクチュエータです.
これまでに折り込み構造を持つ屈曲型,袋を複数連ねた収縮型などを開発しています.
人・物に触れても本質的に安全なロボットの実現を目指しています。
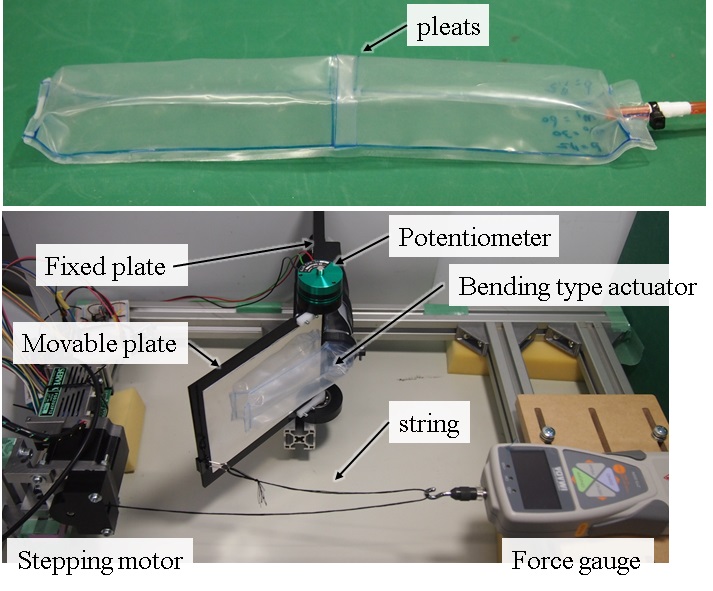
屈曲型アクチュエータの設計
プラスティックフィルムを利用した袋状の空気圧アクチュエータです.
折り込み構造を持つ屈曲型アクチュエータの、折り込み部(プリーツ部)を可変剛性の回転バネとして、
静的な力特性を実験的に導出し、設計手法の確立を行っています。
看護マッサージの学習支援用ソフトセンサの開発
看護におけるハンドマッサージは身体的・精神的に効果的な可能性が示唆されています。
一方で、修得には専任の教員の必要性や自己学習の困難さが指摘されています。
本研究ではシリコーンゴムを用いたソフトセンサを用いて、
分布的な力などを視覚教示する学習システムを開発しています。
看護師を支援するアクティブコルセットの開発
コルセットは常時装着すると筋衰退の可能性が生じます。しかし、業務中に頻度の高い着脱は困難です。
本研究では着用したままで、腹部への圧迫を制御できる空気圧式アクティブコルセットを提案しています。
極めて軽量なインフレータブルアクチュエータを用いており、システムの軽量化が可能性です。
看護動作の一部に対して、効果的であることが筋電位の評価で示されました。