宍忬婰壇僎儖傪梡偄偨儘儃僢僩偺奐敪
宍忬婰壇僎儖傪梡偄偨儘儃僢僩
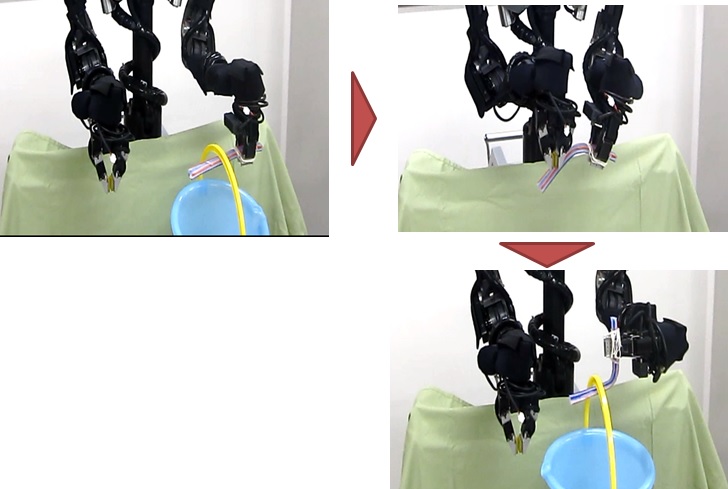
宍忬婰壇僎儖偲偄偆慺嵽傪梡偄偰丆條乆側宍忬偵孞傝曉偟曄宍偝偣側偑傜棙梡偱偒傞儘儃僢僩傪奐敪偟偰偄偰偄傑偡丏
椺偊偽丆儘儃僢僩偱塣傇懳徾暔偵墳偠偰庤愭傪暯柺忬偐傜僗僾乕儞忬偵曄宍偝偣傞側偳偟偰丆巊梡応柺偵墳偠偰曄恎偟側偑傜棙梡偱偒傞儘儃僢僩偺幚尰傪栚巜偟偰偄傑偡丏
宍忬婰壇僎儖惢儘儃僢僩僴儞僪傪梡偄偨憃榪儘儃僢僩
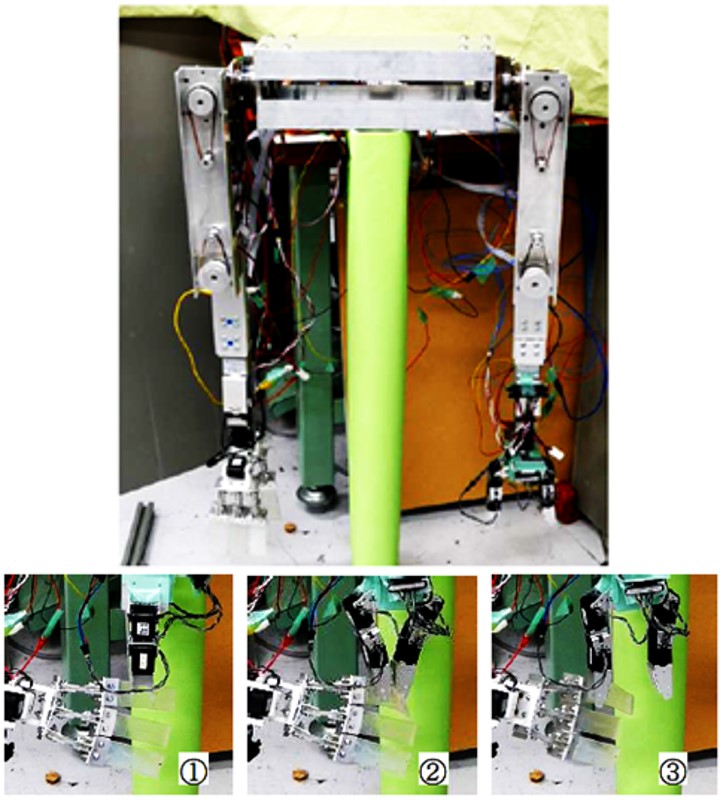
宍忬婰壇僎儖偲偄偆慺嵽傪梡偄偨條乆側宍忬偵曄宍壜擻側儘儃僢僩僴儞僪傪奐敪偟偰偄傞丏
宍忬婰壇僎儖惢僴儞僪傪憃榪儘儃僢僩偵搵嵹偟丆偦偺僴儞僪宍忬偺曄宍傪傕偆堦曽偺僴儞僪傪梡偄偰曄宍傪峴側偆偙偲偱丆
憃榪儘儃僢僩扨懱偵傛傝條乆側僴儞僪宍忬傪幚尰壜擻偲偟丆傑偨曄宍偟偨僴儞僪傪暔懱攃帩傗嶌嬈偵棙梡偡傞儘儃僢僩僔僗僥儉傪奐敪拞偱偁傞丏
宍忬婰壇僎儖偲儚僀儎嬱摦婡峔傪梡偄偨儘儃僢僩僴儞僪偺奐敪
壏搙偵傛偭偰崉惈曄壔偑壜擻側宍忬婰壇僎儖傪峔憿晹偵梡偄丆儚僀儎嬱摦婡峔偵傛偭偰曄宍偝偣傞儘儃僢僩僴儞僪傪奐敪偟偰偄傑偡丏
嬋偘傛偆偲偡傞擟堄偺娭愡傪僯僋儘儉慄偵傛偭偰壛擬丆擃壔偝偣丆儚僀儎傪尅堷偡傞偙偲偱曄宍偡傞巇慻傒偱丆
8娭愡傗16娭愡側偳懡偔偺娭愡傪桳偡傞偙偲偱懡條側曄宍偑壜擻側僴儞僪傪栚巜偟偰偄傑偡丏