研究内容の紹介
[研究内容の概要] 少子高齢化が進む現在の日本社会では,社会システムや産業における省力化や無人化は必須であり,このためのロボットのより高度な活用は重要である.
車両型ロボットに関しては,自動運転,隊列走行,複数の車両型ロボットによる協調作業等の応用が考えられ,これらのタスクを実現する制御システムの設計と早急な社会実装が望まれている.これらの応用の基礎研究として,数理科学的な手法 (具体的には,物理法則に基づく車両のモデリング,車両モデルと非線形制御理論に基づく制御系設計) により 2, 4 輪車両型ロボットのコンピュータ・ネットワーク制御を考慮した安定化制御,軌道追従制御,合意制御,フォーメーション制御等の制御問題に取り組んでいる.
1. 車両型ロボットの軌道追従制御
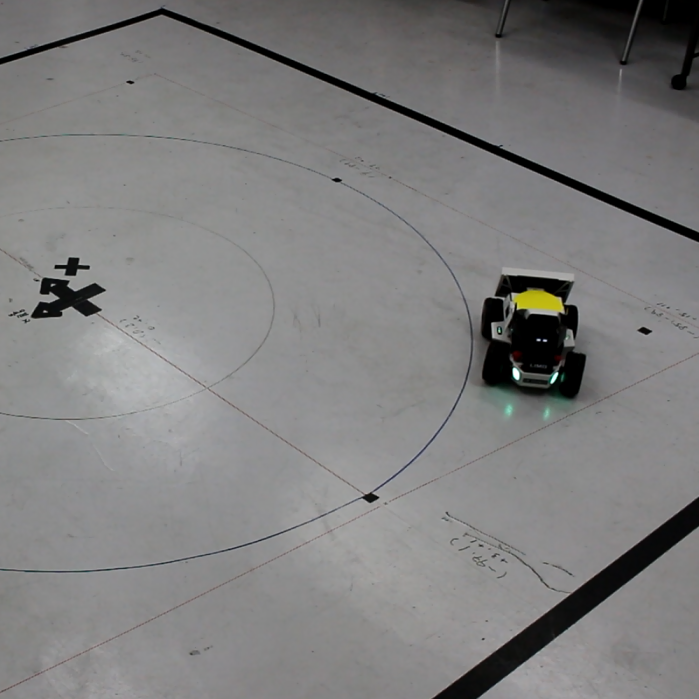
船舶の直線軌道追従に用いられる Line-Of-Sight (LOS) 法を自動車のような 4 輪(ステアリング型)車両ロボットに適用して直線軌道と円軌道への追従制御を達成する制御器を設計する.
車両の運動モデルと設定する目標軌道,LOS ガイダンスアルゴリズムから追従誤差とそのダイナミクスを導出し、追従制御問題を追従誤差ダイナミクスの安定化問題として定式化する.
そして,追従誤差ダイナミクスより制御目的を達成する各種の制御器 (連続時間制御器, シングルレートサンプル値制御器, マルチレートサンプル値制御器) を設計する.
この制御器設計法を拡張して,一般的な目標軌道への追従を達成する制御器の設計法を開発する.
また,GPS のようなグローバルな車両の位置計測が困難な環境での追従制御問題にも取り組んでいく予定である.
・関連する研究業績
-
片山 仁志, 林 航平, 今村 友哉, サンプル値 4 輪車両ロボットの円軌道追従制御, 第68回 システム制御情報学会 研究発表講演会 SCI'24, 2024.
-
片山 仁志, 林 航平, 操舵角飽和を持つ 4 輪車両ロボットの円軌道追従制御, 第11回 制御部門マルチシンポジウム, 2024.
-
林 航平,片山 仁志, 4輪車両ロボットの円軌道追従制御, 2023年度 計測自動制御学会関西支部・システム制御情報学会シンポジウム, 2023.
2. 合意制御・フォーメーション制御
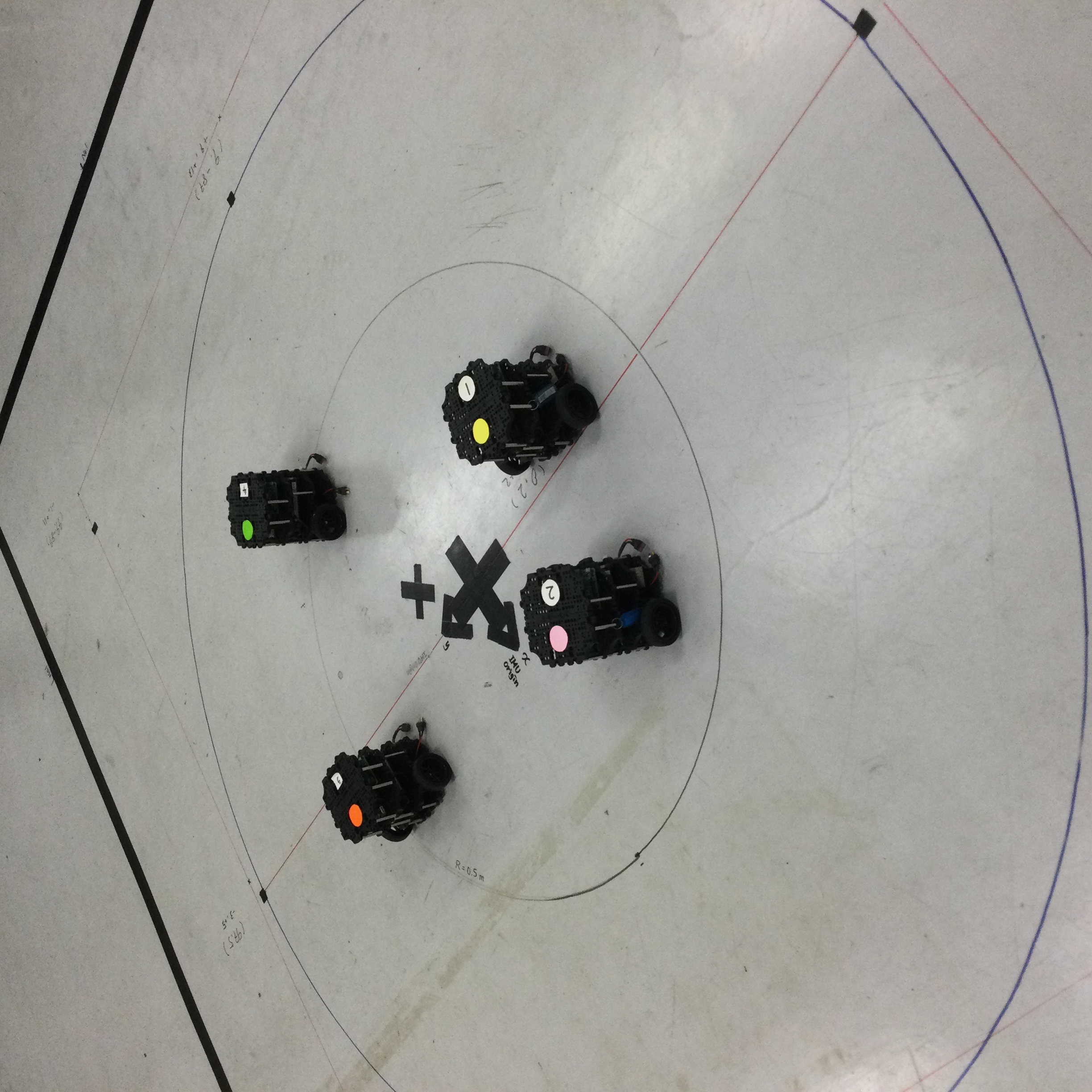
車両の隊列走行や車両型ロボットの協調作業や動作には,複数の車両やロボットを設定された目標位置や姿勢への移動・配置の実現が必要になる.このための基本的な制御である合意制御 (全ての車両やロボットを一点に動かす制御) やフォーメーション制御 (複数の車両やロボットを三角形やダイヤモンド形のような目標形状に配置する制御) を実現する制御器の設計法を開発する.
・関連する研究業績
-
H. Katayama, Synchronization in networks of Takagi-Sugeno fuzzy multi-agent systems, Proc. SICE Annual Conference 2023, pp. 1400-1403, Tsu, Japan (2023).
-
H. Katayama, Observers and output feedback consensus controllers for continuous-time strict-feedback multi-agent systems with sampled observation, Proc. 2016 European Control Conference, pp. 1544-1549, Aalborg, Denmark (2016).
-
H. Katayama, Design of consensus controllers for multi-rate sampled-data strict-feedback multi-agent systems, IFAC-PapersOnLine Vol. 48 (18), pp. 157-162 (2015).
-
H. Katayama, Design of output feedback consensus controllers for nonlinear sampled-data multi-agent systems of strict-feedback form, International Journal of Systems Science, Vol. 45 (9), pp. 1955-1962 (2014).
-
H. Katayama, Sampled-data consensus control for nonlinear multi-agent systems of strict-feedback form with application to marine systems, SICE Journal of Control, Measurement, and System Integration, Vol. 4 (6), pp. 417-422 (2011)
その他研究業績